方嘉煒 (廣東慧航物聯(lián)科技有限公司,廣東 東莞 523000)
0 引言
近幾年來,大多數(shù)中小型模具企業(yè)由于受到規(guī)模小、資金 少等限制,導(dǎo)致生產(chǎn)自動化水平過低,很多企業(yè)在生產(chǎn)中還是 采用人工取料方式。但隨著科技的進(jìn)步與經(jīng)濟(jì)的發(fā)展,人工上 下料等方式將逐漸被機(jī)械自動化生產(chǎn)方式所取代[1]。運(yùn)用機(jī)械 手取料可降低企業(yè)人力成本、提高產(chǎn)品生產(chǎn)效率、保證注塑過 程的安全,消除人工上下料的弊端。雖然從外觀方面觀察,機(jī) 械手的機(jī)構(gòu)看似簡單,但其專用性很強(qiáng),需要我們對工作需求 有深入的分析并定制其機(jī)構(gòu)[2]。本文提出了一種基于臥式注塑 機(jī)的橫走式雙臂單截機(jī)械手自動取塑料件的設(shè)計方案。
1 結(jié)構(gòu)設(shè)計
本文所設(shè)計的橫走式雙臂單截機(jī)械手結(jié)構(gòu)如圖1所示,機(jī) 械手共分為7個模塊,分別為橫走模塊、正臂引拔模塊、正臂升 降模塊、正臂翻轉(zhuǎn)模塊、副臂引拔模塊、副臂升降模塊、副臂夾 取模塊。
橫走模塊由底座、步進(jìn)電機(jī)、滑塊與導(dǎo)軌、皮帶組成,實(shí)現(xiàn) 機(jī)械手在Y軸方向移動的功能。底座連接整個橫走式雙臂單截 機(jī)械手與臥式注塑機(jī),皮帶通過皮帶固定塊設(shè)置于底座上方, 皮帶的材質(zhì)為T形齒型鋼絲PU皮,穩(wěn)定耐用;兩滑軌設(shè)置于皮 帶兩邊,每個滑軌上設(shè)置兩個滑塊,四個滑塊與橫走基座連 接;配有減速器的步進(jìn)電機(jī)通過安裝板固定于橫走基座,并通 過兩個張緊輪與皮帶連接。
正臂引拔模塊設(shè)置于橫走基座上方,通過兩剛度高、質(zhì)量 小的鋁合金連接而成;兩滑軌分別設(shè)置于兩鋁合金上方,每一 滑軌都設(shè)置有滑塊,引拔基座與滑塊連接。氣缸I固定于引拔 基座,并通過固定塊與固定于鋁合金的導(dǎo)柱連接;引拔基座設(shè) 置有兩緩沖器,用于緩沖并限定引拔基座在X軸方向上的移動。
正臂升降模塊設(shè)置于引拔基座側(cè)方,由一個剛度高、質(zhì)量 小的鋁合金作為底座,無桿氣缸設(shè)置于鋁合金中間;鋁合金上 設(shè)置有兩滑塊,與另一設(shè)置于另一升降基座的滑軌配合。無桿 氣缸中的滑塊與升降基座連接固定;緩沖器設(shè)置于鋁合金側(cè) 面,用于限制升降基座在Z軸方向的移動。
正臂翻轉(zhuǎn)模塊設(shè)置于升降基座下方,升降基座與翻轉(zhuǎn)基 座連接。標(biāo)準(zhǔn)氣缸的尾部通過耳環(huán)固定架與翻轉(zhuǎn)基座連接;翻 轉(zhuǎn)板通過銷軸與翻轉(zhuǎn)基座連接,標(biāo)準(zhǔn)氣缸的推桿與翻轉(zhuǎn)板通 過螺釘連接;氣缸、翻轉(zhuǎn)基座、翻轉(zhuǎn)板形成一個活動的三角形, 當(dāng)氣缸伸出時,翻轉(zhuǎn)板底面與水平面平行,當(dāng)氣缸縮回時,翻 轉(zhuǎn)板底面與垂直面平行。
副臂引拔模塊的結(jié)構(gòu)與正臂引拔模塊相似,兩者的引拔 基座都設(shè)置于相同的滑軌上,兩者的氣缸的推桿末端都固定 于同一連桿。副臂升降模塊的結(jié)構(gòu)與正臂升降模塊相同,兩者 有獨(dú)立的活動區(qū)域,避免了相互干涉相撞的問題。副臂夾取模 塊設(shè)置于正臂升降模塊的升降基座下方;副臂夾取模塊設(shè)置 有水口夾,可將注塑模具中的水口件夾取并移出模具。
2 機(jī)械手控制系統(tǒng)
電氣自動化控制技術(shù)在自動化機(jī)械裝備中必不可少,本 文運(yùn)用基于PLC(可編程控制器)的自動化控制方式來控制機(jī) 械手自動上下料。PLC由于具有穩(wěn)定性強(qiáng)、兼容性強(qiáng)等特點(diǎn),非 常適合應(yīng)用于自動化機(jī)械設(shè)備的控制[3]。機(jī)械手控制系統(tǒng)采用 PLC處理中心獲取限位開關(guān)和磁性開關(guān)等的感應(yīng)器數(shù)據(jù),對驅(qū) 動器與電磁閥的控制元件進(jìn)行控制,控制元件再進(jìn)一步發(fā)送 指令至步進(jìn)電機(jī)與各氣缸等執(zhí)行元件完成工作。
整個工作流程的動作邏輯圖如圖2所示。
圖2 動作邏輯圖
橫走式雙臂單截機(jī)械手復(fù)位,正臂翻轉(zhuǎn)模塊與副臂夾取 模塊都在臥式注塑機(jī)的上后方,正臂翻轉(zhuǎn)模塊呈垂直姿態(tài),副 臂夾取模塊呈張開姿態(tài)。當(dāng)臥式注塑機(jī)完成注塑后打開防護(hù) 門,并向可編程控制器發(fā)送信號,可編程控制器向兩升降氣缸 的電磁閥發(fā)送開關(guān)量信號, 電磁閥的閥芯改變氣路方向,升降氣缸向下運(yùn)動,到位后升降 氣缸的下限位開關(guān)反饋信號至可編程控制器。可編程控制器 向兩張拔氣缸的電磁閥發(fā)送開關(guān)量信號,電磁閥的閥芯改變 氣路方向,張拔氣缸向左運(yùn)動,正臂翻轉(zhuǎn)模塊與副臂夾取模塊 夾取產(chǎn)品和水口,升降氣缸的左限位開關(guān)反饋信號至可編程 控制器。可編程控制器向兩張拔氣缸的電磁閥發(fā)送開關(guān)量信 號 ,電 磁 閥 的 閥 芯 再 次 改 變 氣 路 方 向 ,張 拔 氣 缸 復(fù) 位 ,產(chǎn) 品 和 水口脫離模具,升降氣缸的右限位開關(guān)反饋信號至可編程控 制器。可編程控制器向兩升降氣缸的電磁閥發(fā)送開關(guān)量信號, 電磁閥的閥芯改變氣路方向,升降氣缸向上運(yùn)動,注塑產(chǎn)品與 水口被移動至上方,升降氣缸的上限位開關(guān)反饋信號至可編 程控制器。可編程控制器向驅(qū)動器發(fā)送脈沖信號,驅(qū)動器通過 向步進(jìn)電機(jī)發(fā)送脈沖信號的方式控制步進(jìn)電機(jī)輸出軸旋轉(zhuǎn), 帶動機(jī)械手在Y軸方向移動。到達(dá)位置后,可編程控制器控制 水口夾張開,放下水口件。可編程控制器繼續(xù)向驅(qū)動器發(fā)送脈 沖信號,促使步進(jìn)電機(jī)旋轉(zhuǎn),帶動機(jī)械手在Y軸方向移動,將 注塑產(chǎn)品放置于皮帶輸送線上,橫走式雙臂單截機(jī)械手復(fù)位。
3結(jié)語
本文主要對橫走式雙臂單截機(jī)械手在臥式注塑機(jī)的應(yīng)用 進(jìn)行了研究,并對其中的結(jié)構(gòu)設(shè)計與機(jī)械手的控制系統(tǒng)展開 了詳細(xì)介紹,解決了傳統(tǒng)手工操作危險、生產(chǎn)效率低等問題, 可為注塑領(lǐng)域提供參考借鑒。
[參考文獻(xiàn)]
[1] 管洋.基于注塑機(jī)的伺服機(jī)械手的研究[D].青島:青島科技 大學(xué),2013.
[2] 潘鵬.淺析自動化機(jī)械手的作用及在現(xiàn)實(shí)中的應(yīng)用[J].科技 經(jīng)濟(jì)導(dǎo)刊,2019,27(12):63.
[3] 李春艷.PLC在工業(yè)機(jī)械手中的應(yīng)用[J].企業(yè)技術(shù)開發(fā)(學(xué)術(shù) 版),2018,37(9):72-74,136.
























 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入... 塑料包裝材料的減...
塑料包裝材料的減...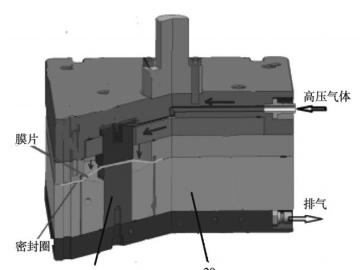 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I... 高性能注塑聚丙烯...
高性能注塑聚丙烯...





