王浩1,王繼先2
1平頂山技師學(xué)院,河南平頂山467000
2河南化工技師學(xué)院,河南開(kāi)封475004
摘 要:為提高注塑機(jī)液壓伺服控制系統(tǒng)的精確度和穩(wěn)定性,提出了基于量子遺傳算法的注塑機(jī)PID控制系統(tǒng)。引入量子遺傳算法對(duì)注塑機(jī)PID系統(tǒng)參數(shù)進(jìn)行全局尋優(yōu),以累積誤差作為目標(biāo)函數(shù),根據(jù)實(shí)際工況動(dòng)態(tài)調(diào)節(jié)PID參數(shù)。仿真實(shí)驗(yàn)和實(shí)測(cè)分析結(jié)果表明,本控制系統(tǒng)在精度和穩(wěn)定性上優(yōu)于傳統(tǒng)PID控制方法,且超調(diào)量更小、運(yùn)算速度更快,有效確保了產(chǎn)品質(zhì)量的一致性。
關(guān)鍵詞:注塑機(jī);液壓系統(tǒng);PID;量子遺傳算法
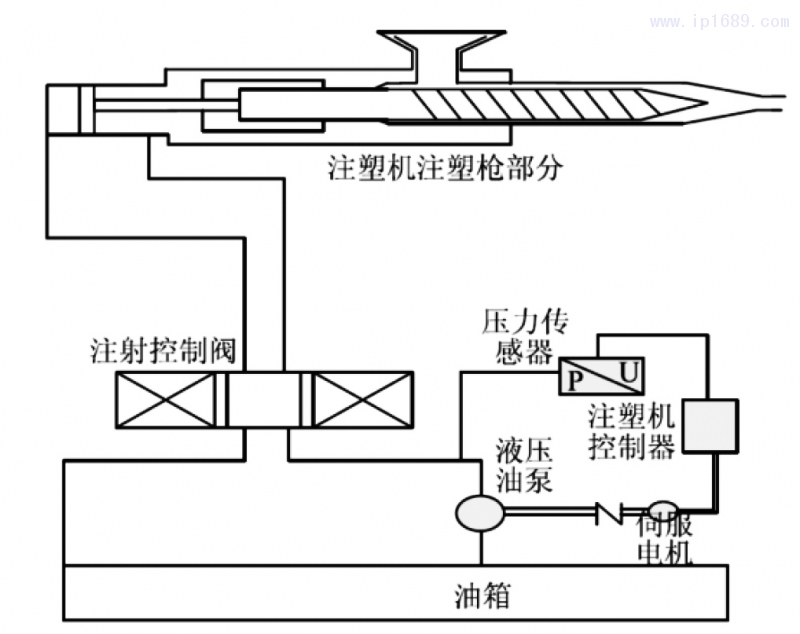
液壓系統(tǒng)是注塑機(jī)的重要組成部分,液壓控制系統(tǒng)直接關(guān)系到塑料制品的質(zhì)量和性能[1-3]。圖1為注塑機(jī)伺服閉環(huán)控制系統(tǒng),該系統(tǒng)包含伺服電機(jī)、液壓泵、液壓閥等器件,與注塑產(chǎn)品生產(chǎn)緊密關(guān)聯(lián)。為保證注塑機(jī)穩(wěn)定工作,注塑機(jī)液壓伺服系統(tǒng)主要采用PID閉環(huán)控制技術(shù)進(jìn)行反饋調(diào)節(jié)。文獻(xiàn)[4]將PID與神經(jīng)網(wǎng)絡(luò)融合,實(shí)時(shí)調(diào)節(jié)液壓控制系統(tǒng)相關(guān)參數(shù),顯著提高了注塑制品的尺寸精度;文獻(xiàn)[5]使用PID分段控制液壓系統(tǒng),提高了注塑機(jī)控制精度,克服了PID固定參數(shù)引起控制精度下降的問(wèn)題;文獻(xiàn)[6]結(jié)合變論域與自適應(yīng)模糊PID控制理論設(shè)計(jì)了控制系統(tǒng),顯著提高了注塑機(jī)液壓系統(tǒng)的動(dòng)態(tài)性能。上述方案均具有自動(dòng)調(diào)節(jié)能力,大幅提升了注塑制品的質(zhì)量和生產(chǎn)效率,但是在參數(shù)選擇上仍然不夠快速靈活,存在調(diào)節(jié)時(shí)間過(guò)長(zhǎng)等問(wèn)題。
近年來(lái),量子理論與經(jīng)典優(yōu)化算法的結(jié)合得到了國(guó)內(nèi)外學(xué)者的廣泛關(guān)注。文獻(xiàn)[7]將量子理論與遺傳算法結(jié)合,進(jìn)一步提高了遺傳算法的收斂速度,解決了敏捷成像衛(wèi)星調(diào)度問(wèn)題;文獻(xiàn)[8]將量子理論應(yīng)用于菌群算法,以更快的速度完成了PID參數(shù)整定;文獻(xiàn)[9]運(yùn)用量子理論改進(jìn)粒子群優(yōu)化算法,獲得了更快的尋優(yōu)速度。上述研究表明,量子優(yōu)化算法具有更快的尋優(yōu)速度、更高的尋優(yōu)精度,適用于解決多參數(shù)全局尋優(yōu)問(wèn)題。
注塑機(jī)液壓系統(tǒng)的PID控制系統(tǒng)參數(shù)關(guān)系到注塑制品質(zhì)量,根據(jù)反饋信息對(duì)液壓伺服系統(tǒng)的控制參數(shù)進(jìn)行動(dòng)態(tài)調(diào)整,有利于提高系統(tǒng)的穩(wěn)定性。因此,本文引入量子遺傳算法實(shí)時(shí)調(diào)節(jié)液壓伺服系統(tǒng)的PID參數(shù),以克服不確定因素帶來(lái)的干擾,提升注塑機(jī)在生產(chǎn)過(guò)程的自適應(yīng)能力。
1問(wèn)題描述
在生產(chǎn)過(guò)程中,注塑機(jī)液壓伺服系統(tǒng)一方面要保證較高的響應(yīng)速度,根據(jù)外界環(huán)境變化和產(chǎn)品生產(chǎn)過(guò)程及時(shí)調(diào)節(jié);另一方面還要確保較高的控制精度,參數(shù)調(diào)節(jié)必須能夠反應(yīng)真實(shí)的生產(chǎn)需求。塑料融化過(guò)程中,壓力處于時(shí)刻變化狀態(tài),需要對(duì)壓力進(jìn)行及時(shí)響應(yīng);熔料流入壓力槍后,一旦出現(xiàn)壓力不均衡的情況,將引起熔料在注塑槍內(nèi)回流,對(duì)注塑制品質(zhì)量產(chǎn)生嚴(yán)重影響。綜上,必須使用具有全局快速尋優(yōu)能力的算法對(duì)液壓系統(tǒng)進(jìn)行實(shí)時(shí)控制。
2量子遺傳算法
2.1量子編碼
與其他優(yōu)化算法不同,量子遺傳算法使用量子比特來(lái)表示種群中的每一個(gè)個(gè)體。在量子理論中,量子比特的表達(dá)式為:
式(1)中,|0〉、|1〉稱為量子比特的基態(tài),α和β分別表示對(duì)應(yīng)基態(tài)的量子概率幅。量子比特的量子概率幅在數(shù)學(xué)上必須滿足約束條件:
由式(2)可得,α,β∈[-1,1]。
n維尋優(yōu)問(wèn)題可以表達(dá)為:
式(3)中,X=(x1,x2,…,xn)T∈Rn,為n維尋優(yōu)問(wèn)題的最優(yōu)解,aj和bj表示最優(yōu)解X的第j個(gè)變量xj的臨界值。量子遺傳算法使用式的量子概率幅對(duì)個(gè)體進(jìn)行編碼:
Pi(t)表示第t代種群中第i個(gè)個(gè)體。由于圖片|cos(x)|2+|sin(x)|2=1,滿足式(2)約束條件,故使用sin和cos函數(shù)對(duì)式(4)進(jìn)一步表達(dá):
式(5)中,θij表示角度,θij=2π×rnd,rnd為[-1,1]范圍內(nèi)的實(shí)數(shù);i=1,2,…,m,表示種群個(gè)體;j=1,2,…,n,表示個(gè)體的量子比特。式(5)表明,對(duì)于一個(gè)n維的尋優(yōu)問(wèn)題,每一個(gè)個(gè)體需要使用n個(gè)量子比特。由此可得,n維尋優(yōu)問(wèn)題實(shí)際上是在n維量子空間In=[−1,1]n內(nèi)部搜索最優(yōu)解的過(guò)程。
對(duì)于任意實(shí)數(shù)而言,如果用余弦進(jìn)行表示,必然存在2個(gè)角度與之對(duì)應(yīng);如果用正弦進(jìn)行表示,同樣存在2個(gè)角度與之對(duì)應(yīng)。因此對(duì)于一個(gè)實(shí)數(shù)必然存在4個(gè)角度值在量子空間與之對(duì)應(yīng)。對(duì)于n維的尋優(yōu)問(wèn)題而言,如果實(shí)數(shù)空間Rn存在M個(gè)全局最優(yōu)解,在n維量子空間In=[−1,1]n中對(duì)應(yīng)有4nM=2n+1M個(gè)最優(yōu)解[10-11]。這一結(jié)論表明,將實(shí)數(shù)空間的解映射到量子空間,全局最優(yōu)解將以指數(shù)倍數(shù)增加,極大增加了搜索到最優(yōu)解的概率。
2.2個(gè)體進(jìn)化
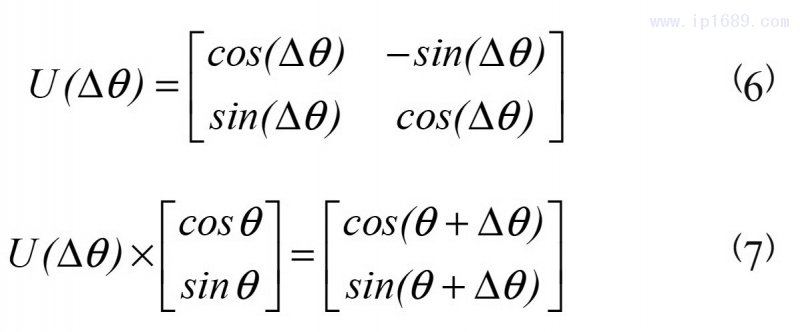
量子遺傳算法的個(gè)體進(jìn)化更新時(shí),主要通過(guò)對(duì)自身量子比特概率幅進(jìn)行改變,通常通過(guò)量子旋轉(zhuǎn)門(mén)完成:
Δθ為量子進(jìn)化算法中的個(gè)體轉(zhuǎn)角步長(zhǎng),其取值大小直接關(guān)系到量子進(jìn)化算法的搜索能力。Δθ過(guò)小容易陷入局部最優(yōu)解,不利于全局最優(yōu)解尋找;Δθ過(guò)大能提高搜索速度,但會(huì)降低精度,影響控制對(duì)象的性能。
2.3個(gè)體變異
在保證精度的前提下,如果只采用個(gè)體進(jìn)化,往往難以跳出覆蓋范圍較大的局部最優(yōu)解。因此,在進(jìn)化過(guò)程中必須選擇個(gè)體進(jìn)行變異,大幅改變個(gè)體的量子比特狀態(tài),與當(dāng)前種群形成顯著差異。可采用量子非門(mén)完成個(gè)體變異:
經(jīng)過(guò)量子非門(mén)轉(zhuǎn)換,結(jié)合式(4)和式(5)可知,此時(shí)量子比特的量子概率幅進(jìn)行了調(diào)換,極大改變了量子比特狀態(tài),有助于擺脫當(dāng)前種群局限,提高全局搜索能力。
2.4解空間變換
量子比特尋找最優(yōu)解范圍在[-1,1]區(qū)間,必須將[-1,1]映射回實(shí)數(shù)空間才能得出最終結(jié)果。結(jié)合式(2),可以分別使用α和β將量子空間的值換算為實(shí)數(shù)空間解。根據(jù)式(3)可知:
(1)如果使用基態(tài)|0〉的量子概率幅α,則實(shí)數(shù)空間中最優(yōu)解X的第j位轉(zhuǎn)換式為:
(2)如果使用基態(tài)|1〉的量子概率幅β,則實(shí)數(shù)空間中最優(yōu)解X的第j位轉(zhuǎn)換式為:
綜上,量子遺傳算法的個(gè)體使用量子編碼,但進(jìn)化過(guò)程與傳統(tǒng)的遺傳算法基本一致,由于具有更多的全局最優(yōu)解,因此其搜索速度更快,一定程度上避免了陷入局部最優(yōu)解。
3 PID控制系統(tǒng)
基于量子遺傳算法的注塑機(jī)PID控制系統(tǒng)如圖2所示。
PID控制系統(tǒng)的輸入輸出關(guān)系為:
量子遺傳算法用于對(duì)式(11)中的三個(gè)參數(shù)KP、KI、KD進(jìn)行尋優(yōu)。由于系統(tǒng)具有滯后性,無(wú)法使用瞬時(shí)誤差e(t)判斷當(dāng)前參數(shù)是否為最優(yōu)參數(shù),本文采用累積誤差作為目標(biāo)函數(shù):
4實(shí)驗(yàn)分析
4.1 仿真分析
利用MATLAB的Simulink對(duì)本文所提PID控制系統(tǒng)進(jìn)行測(cè)試,信號(hào)輸入為階躍信號(hào)。參數(shù)設(shè)置參考200T注塑機(jī),具體參數(shù)如表1所示。
圖3為仿真實(shí)驗(yàn)結(jié)果,仿真時(shí)間10s,系統(tǒng)輸入為1。傳統(tǒng)PID系統(tǒng)根據(jù)經(jīng)驗(yàn)將三個(gè)參數(shù)設(shè)置為KP=2、KI=0.08?KD=0.03。從圖3可以看出,基于量子遺傳算法的注塑機(jī)PID控制系統(tǒng)超調(diào)量更小,輸出波動(dòng)更小。與傳統(tǒng)PID相比,量子優(yōu)化PID系統(tǒng)的參數(shù)隨著反饋動(dòng)態(tài)調(diào)節(jié),輸出控制更加平穩(wěn),調(diào)節(jié)速度更快,有利于保證產(chǎn)品質(zhì)量。
4.2實(shí)測(cè)分析
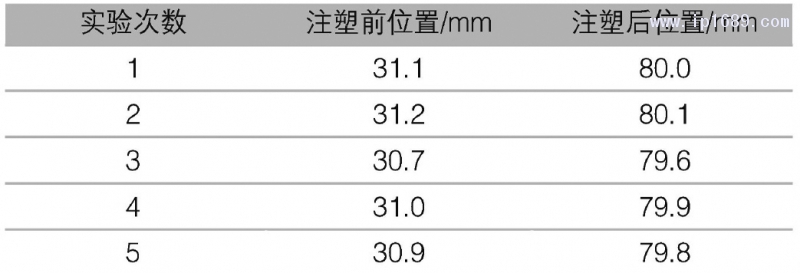
以200T伺服型注塑機(jī)進(jìn)行實(shí)測(cè)分析。起始位置設(shè)置為31mm,注塑完畢位置設(shè)置為80mm,表2為注塑前后螺桿位置對(duì)比。
從表2可以看出,注塑前螺桿的位置最大值為31.2mm,最小值為30.7mm;注塑后螺桿的位置最大值為80.1mm,最小值為79.6mm。誤差均在1%以內(nèi),說(shuō)明本文提出的控制系統(tǒng)具有較高精度。
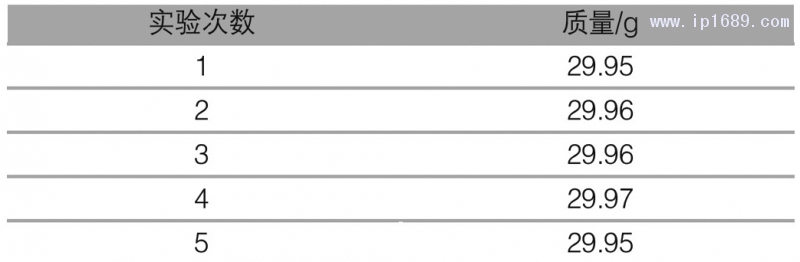
以30g注塑產(chǎn)品為例檢測(cè)其質(zhì)量,結(jié)果如表3所示。從表3可以看出,所有產(chǎn)品質(zhì)量誤差均在1%以內(nèi),說(shuō)明基于量子遺傳算法的注塑機(jī)PID控制系統(tǒng)具有良好的穩(wěn)定性,能充分保證產(chǎn)品質(zhì)量的一致性。
5結(jié)論
將量子遺傳算法引入傳統(tǒng)PID控制,動(dòng)態(tài)調(diào)節(jié)注塑機(jī)液壓伺服系統(tǒng)的PID控制參數(shù),有效提高了控制系統(tǒng)的精確度和穩(wěn)定性。量子遺傳算法具有較高的全局尋優(yōu)能力,能夠針對(duì)外部環(huán)境變化和產(chǎn)品生產(chǎn)反饋信息實(shí)時(shí)調(diào)整參數(shù)。與傳統(tǒng)PID控制系統(tǒng)相比,基于量子遺傳算法的注塑機(jī)PID控制系統(tǒng)能夠以較小的超調(diào)量、較快的運(yùn)算速度獲得質(zhì)量穩(wěn)定的注塑制品,為注塑機(jī)控制提供了一種有效途徑。
參考文獻(xiàn):
[1] 焦志偉,安瑛,謝鵬程,等.新型注塑機(jī)合模機(jī)構(gòu)內(nèi)循環(huán)節(jié)能機(jī)理[J].機(jī)械工程學(xué)報(bào),2012,48(10):153-159.
[2] 曾廣勝,瞿金平,江太君,等.一種注塑機(jī)鎖模系統(tǒng)的理論計(jì)算與模擬分析[J].高分子材料科學(xué)與工程,2012,28(2):169-173.
[3] 劉浩.注塑機(jī)領(lǐng)域的研究進(jìn)展[J].合成樹(shù)脂及塑料,2018,35(4):99-102.
[4] 黨霞.基于自適應(yīng)神經(jīng)網(wǎng)絡(luò)PID的注塑機(jī)溫度控制[J].合成樹(shù)脂及塑料,2018,35(6):83-86.
[5] 陶西孟,羅亮,劉知貴.基于分段PID的注塑機(jī)料筒溫度控制算法研究與仿真[J].塑料,2015,44(3):68-70.
[6] 張鵬,馮顯英,霍睿,等.基于變論域自適應(yīng)模糊PID的注塑機(jī)溫控系統(tǒng)研究[J].組合機(jī)床與自動(dòng)化加工技術(shù),2017(7):107-109,115.
[7] 王海蛟,賀歡,楊震.敏捷成像衛(wèi)星調(diào)度的改進(jìn)量子遺傳算法[J].宇航學(xué)報(bào),2018,39(11):1266-1274.
[8] 劉璐,單梁,戴躍偉,等.非線性動(dòng)態(tài)自適應(yīng)旋轉(zhuǎn)角的量子菌群算法[J].控制與決策,2017,32(12):2137-2144.
[9] 張藝瀛,金志剛.一種高維多模態(tài)優(yōu)化的量子粒子群優(yōu)化算法[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2018,50(11):50-58,82.
[10] 劉志剛,許少華,李盼池,等.基于量子衍生布谷鳥(niǎo)的脊波過(guò)程神經(jīng)網(wǎng)絡(luò)及TOC預(yù)測(cè)[J].控制與決策,2017,32(6):1115-1120.
[11] 張強(qiáng),李盼池,劉麗杰.基于量子混合蛙跳算法的油田開(kāi)發(fā)規(guī)劃多目標(biāo)優(yōu)化[J].信息與控制,2014,43(1):116-122.






















 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入... 塑料包裝材料的減...
塑料包裝材料的減...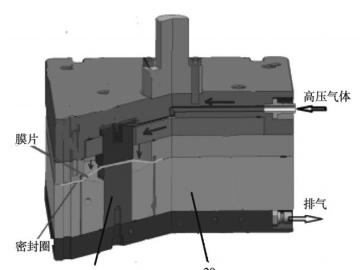 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I... 高性能注塑聚丙烯...
高性能注塑聚丙烯...













