周冬冬,陳明霞,趙金迪
(桂林理工大學(xué)機(jī)械與控制工程學(xué)院,廣西桂林 541006)
摘要: 為提高橡膠擠出機(jī)Smith-模糊PID溫度控制系統(tǒng)的控制精度,更好地實(shí)現(xiàn)智能整定參數(shù)與橡膠擠出機(jī)溫度最優(yōu)控制,采用混合粒子群(HPSO)算法優(yōu)化Smith-模糊PID控制系統(tǒng),完成對(duì)溫度控制系統(tǒng)PID參數(shù)基準(zhǔn)值的自動(dòng)尋優(yōu)。借助MATLAB軟件辨識(shí)擠出機(jī)溫控系統(tǒng)數(shù)學(xué)模型,搭建Smith-模糊PID溫度控制系統(tǒng)。為避免粒子群 (PSO)算法陷入局部最優(yōu),在PSO算法的基礎(chǔ)上將社會(huì)因子分解為局部社會(huì)因子和全局社會(huì)因子,設(shè)計(jì)出HPSO算法對(duì)PID參數(shù)進(jìn)行尋優(yōu);將HPSO算法優(yōu)化系統(tǒng)前后的控制效果進(jìn)行對(duì)比。結(jié)果表明:采用HPSO算法優(yōu)化Smith-模糊PID溫度控制系統(tǒng)的控制精度更高、抗干擾性能更強(qiáng),溫度控制精度在±(1~1.5) ℃以內(nèi),并且接近±1℃,完全滿足橡膠擠出生產(chǎn)過(guò)程中對(duì)料筒溫度控制的指標(biāo)要求,可以在一定程度上提升溫控系統(tǒng)的控制精度以及擠出機(jī)械的智能化水平。
關(guān)鍵詞: 橡膠擠出機(jī);溫度控制系統(tǒng);模糊PID控制;Smith預(yù)估;混合粒子群算法
0 前言
橡膠具有韌性高、延展性強(qiáng)、絕緣性好等特點(diǎn),是汽車輪胎工業(yè)必不可少的原材料。橡膠擠出機(jī)是橡膠制品擠出成型過(guò)程中的核心機(jī)械設(shè)備,對(duì)其精密控制是實(shí)現(xiàn)擠出半成品達(dá)到高質(zhì)量標(biāo)準(zhǔn)的必要途徑。擠出過(guò)程受各類波動(dòng)因素的影響,其中,橡膠膠料對(duì)于溫度的變化十分敏感,因此擠出機(jī)溫度的波動(dòng)會(huì)直接影響半成品物理性能,溫度過(guò)低或過(guò)高,都會(huì)導(dǎo)致膠料熔融效果較差,對(duì)擠出半成品的質(zhì)量造成很大的影響[1]。
在實(shí)際擠出生產(chǎn)過(guò)程中,對(duì)膠料品質(zhì)起主要影響的是擠出機(jī)料筒部分的溫控[2-3]。傳統(tǒng)PID料筒溫控系統(tǒng)控制精度低,無(wú)法解決料筒溫控過(guò)程中存在的大滯后問(wèn)題,而Smith-模糊PID料筒溫控系統(tǒng)可以很好地解決溫控過(guò)程中的滯后問(wèn)題,提高溫度控制精度。在料筒溫控過(guò)程中,PID控制器的參數(shù)有一個(gè)基準(zhǔn)值,而模糊PID算法就是在原PID的基礎(chǔ)上根據(jù)誤差對(duì)PID參數(shù)基準(zhǔn)值進(jìn)行動(dòng)態(tài)微調(diào)。但在控制過(guò)程中,基準(zhǔn)值是靜態(tài)不變的,而且是通過(guò)人工經(jīng)驗(yàn)調(diào)節(jié)得到的,并不是最優(yōu)參數(shù)。
針對(duì)上述問(wèn)題,本文作者在搭建料筒Smith-模糊PID溫度控制系統(tǒng)的基礎(chǔ)上,設(shè)計(jì)一種 HPSO(Hybrid Particle Swarm Optimization)算法優(yōu)化Smith-模糊PID溫度控制系統(tǒng),實(shí)現(xiàn)智能整定 Smith-模糊PID控制器參數(shù)。將智能算法與Smith-模糊PID有效結(jié)合并應(yīng)用于橡膠擠出機(jī)料筒溫度控制中,不僅解決了料筒溫控過(guò)程中存在的大滯后問(wèn)題,還實(shí)現(xiàn)了自動(dòng)尋優(yōu)PID參數(shù)的基準(zhǔn)值,提高Smith-模糊PID溫度控制系統(tǒng)的控制精度,實(shí)現(xiàn)對(duì)于擠出機(jī)料筒溫度的精密控制。
1、擠出機(jī)溫度控制系統(tǒng)工藝簡(jiǎn)介
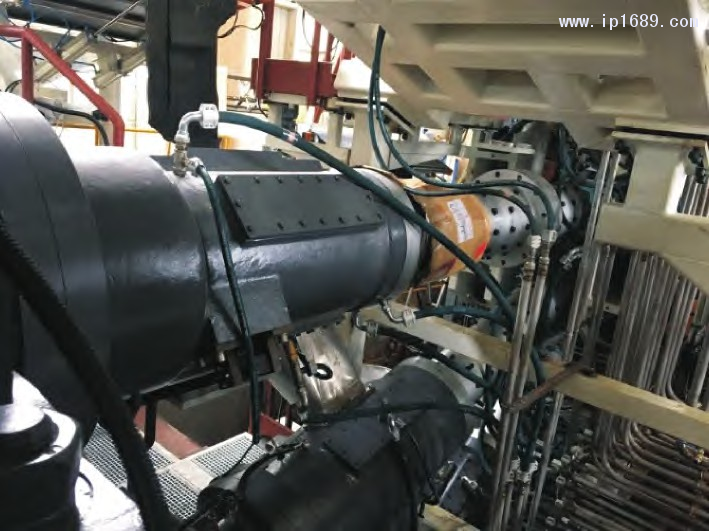
本文作者研究的主要是銷釘式冷喂料橡膠擠出機(jī),其溫控系統(tǒng)由循環(huán)水管路和電控加熱器件組成。料筒中膠料的溫度主要通過(guò)電控加熱器加熱循環(huán)水來(lái)控制[4]。循環(huán)水通過(guò)加熱器加熱以后,經(jīng)加壓泵供給料筒的外壁流道及螺桿冷卻孔中,實(shí)現(xiàn)膠料溫度的增加。料筒循環(huán)水管路如圖1所示。
圖 1 料筒管路外觀
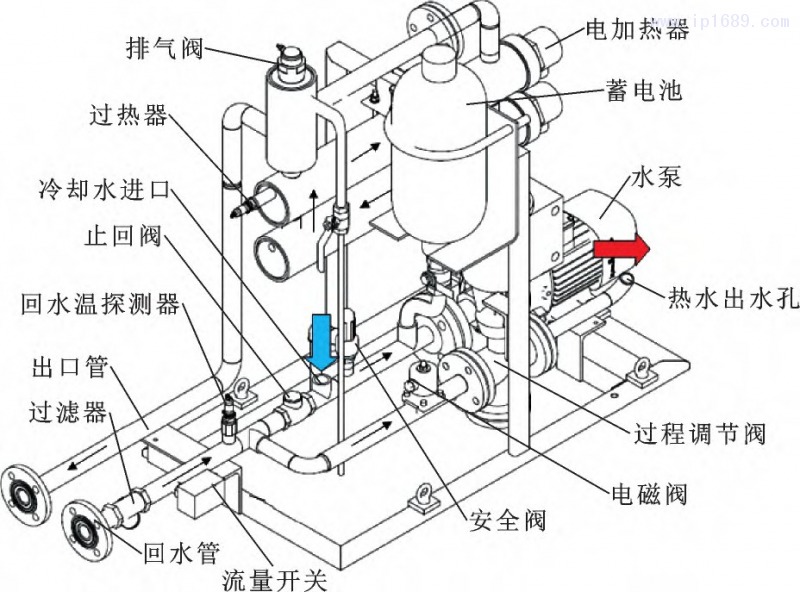
當(dāng)水溫探測(cè)器檢測(cè)到循環(huán)水溫度高于設(shè)定值時(shí),加冷卻水進(jìn)入循環(huán)熱水中,降低循環(huán)水的溫度。通過(guò)分析料筒溫度控制工藝,知道文中研究的料筒溫度控制系統(tǒng)的主要控制量是循環(huán)水的電加熱器功率。具體的電控系統(tǒng)實(shí)物結(jié)構(gòu)如圖2所示。
圖 2 水循環(huán)電控系統(tǒng)實(shí)物結(jié)構(gòu)
2、Smith- 模糊PID溫控系統(tǒng)搭建
Smith-模糊PID溫控系統(tǒng)是在模糊PID控制系統(tǒng)的基礎(chǔ)上,加入Smith預(yù)估器,所以首先要搭建模糊PID控制器。根據(jù)料筒溫度控制工藝結(jié)合模糊控制器選型規(guī)則,模糊控制器選取二維型。r(t) 為溫度設(shè)定值,y(t)為實(shí)際檢測(cè)溫度值,兩者的偏差e和偏差變化率ec為輸入,具體結(jié)構(gòu)如圖3所示。
圖 3 模糊 PID 控制原理
模糊控制器的模糊子集的符號(hào)以及對(duì)應(yīng)的含義和數(shù)值如表1所示。
表 1 模糊規(guī)則中的符號(hào)含義
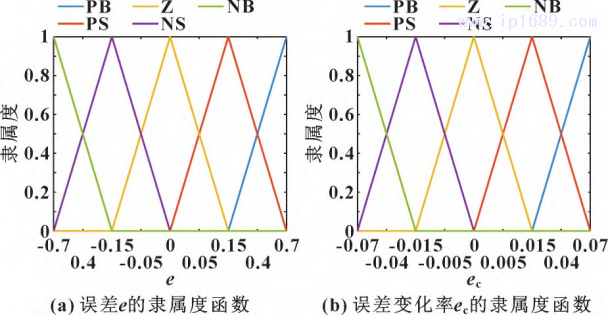
輸入、輸出模糊論域分別設(shè)置為 {-0.7、-0.4、-0.15、0、0.15、0.4、0.7} 、{ -0.4、-0.2、-0.1、-0.05、0、0.05、0.1、0.2、0.4} 。如圖4所示,選用三角形隸屬函數(shù)采用Mamdani推理法與重心法分別進(jìn)行去模糊化和清晰化[5],模糊控制規(guī)則如表2所示。
圖 4 輸入變量的隸屬度函數(shù)
表 2 ΔKp、ΔKi、ΔKd 的模糊控制規(guī)則
在模糊PID控制器搭建完成后,繼續(xù)搭建Smith預(yù)估控制器。料筒溫控傳遞函數(shù)為
特征方程為
根據(jù) Smith 滯后補(bǔ)償原理[6],搭建Smith預(yù)估控制器如圖5所示。有 Gτ(s)=G0(s) ( 1-e-τs) ,
Y*(s)=G0(s)。
圖 5 Smith 預(yù)估控制系統(tǒng)結(jié)構(gòu)
將所搭建的Smith預(yù)估器加入到模糊PID控制器中,得到料筒溫度Smith-模糊PID控制系統(tǒng)如圖6所示[7-8]。
圖 6 Smith-模糊 PID 控制原理
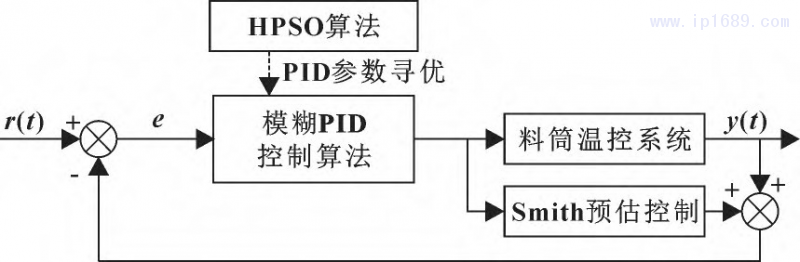
在完成Smith-模糊PID控制系統(tǒng)搭建后,采用HPSO算法進(jìn)行優(yōu)化,實(shí)現(xiàn)智能精準(zhǔn)尋優(yōu)PID控制參數(shù)。優(yōu)化結(jié)構(gòu)如圖7所示。
圖 7 HPSO-Smith 模糊 PID 料筒溫控系統(tǒng)結(jié)構(gòu)
3 混合粒子群算法簡(jiǎn)介
3. 1 粒子群算法描述
粒子群優(yōu)化 ( Particle Swarm Optimization,PSO)是一種隨機(jī)搜索算法,在動(dòng)態(tài)或者多目標(biāo)優(yōu)化環(huán)境中,更能發(fā)揮自身的優(yōu)勢(shì)[9]。假設(shè)群體的搜索解空間為D維,種群規(guī)模為N,第i個(gè)粒子坐標(biāo)為 xi =[xi1,xi2,…,xiD]T、速度為vi=[vi1,vi2,…,viD]T,第i個(gè)粒子的歷史最佳位置為Pi=[Pi1,Pi2,…,PiD]T,整個(gè)種群尋的最佳位置為Pg=[Pg1,Pg2,…,PgD]T[10]。
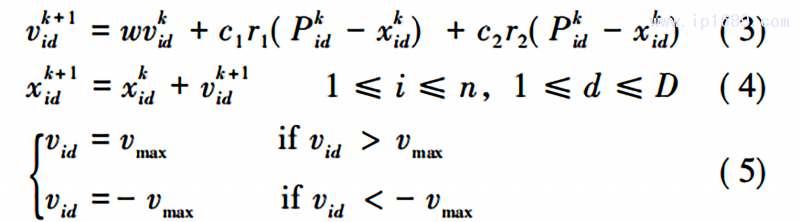
當(dāng)搜索到以上2個(gè)最佳位置時(shí),粒子就根據(jù)式(3) (4)更新自身的速度和位置:
式中: w 為慣性權(quán)重; k 為當(dāng)前迭代次數(shù); vid為粒子速度,vid∈[- vmax,vmax ] ; c1和c2為粒子加速常數(shù); r1 和 r2 為 ( 0,1) 內(nèi)的隨機(jī)數(shù)。
每個(gè)粒子的初速度定為0,即 v0 = 0,第j(1≤j≤ m)個(gè)粒子的下一次迭代的速度v(j)由三部分組成:
v(j) = w·v0 + c1·r·[P(j)-x(j)]+ c2·r·[PG-x(j)](6)
式中: r為( 0,1)內(nèi)的隨機(jī)數(shù); v0為上一次迭代的粒子速度; w·v0 為自身慣性因子; c1·r·[P(j)-x(j)]為自身最優(yōu)因子,P(j)為第j個(gè)因子自適應(yīng)度最高的位置; c2·r·[PG-x(j)]為社會(huì)因子,PG為種群中自適應(yīng)度最高的位置。
對(duì)于第j個(gè)粒子,第k+1次迭代的位置 x(j)k+1與第k次迭代的位置x(j)k、速度v(j+1)k關(guān)系為
式中: dt 為仿真間隔。
記前 k 次的 PG 為 P(k)G ,第k+1次迭代中適應(yīng)度最高的粒子位置記為P( k+1)G ,則最終的PG為
記前k次的第j個(gè)粒子的位置為P(j)k,第 k+1次的第j個(gè)粒子的位置為P(j)k+1,則最終的歷史最優(yōu)解P(j)為
3. 2 混合粒子群算法設(shè)計(jì)
本文作者在 PSO 算法的基礎(chǔ)上,將PSO算法中的社會(huì)因子分解為局部社會(huì)因子和全局社會(huì)因子,即得到混合粒子群( HPSO) 算法,所以HPSO算法中粒子速度可表示[11]為
式中: 0<q<1,q為全局社會(huì)因子的占比;PG為全局最優(yōu)解。P(j)與PG的計(jì)算公式在PSO算法中已給出,有所不同的是,P(j)L為第j個(gè)粒子的局部最優(yōu)解坐標(biāo)。
將第k次迭代的P(j)L記為P(j)L,k,第 k次迭代的第i粒子的位置為P(i)k,則有:
即在與第j個(gè)粒子的距離不超過(guò)R的所有粒子中,選擇具有最小函數(shù)值的粒子。
3. 3 混合粒子群算法優(yōu)化流程
HPSO 算法優(yōu)化 Smith-模糊PID控制器參數(shù)的步驟:
步驟1,確定參數(shù)維度N、慣性系數(shù)c1、c2、w、種群規(guī)模m、迭代次數(shù)n、局部因子作用半徑R;
步驟2,計(jì)算每個(gè)粒子的速度;
步驟3,計(jì)算每個(gè)粒子的自適應(yīng)度 F(j)k+1 ,計(jì)算出P(j)、PG和P(j)L ;
步驟4,將上一步中的粒子依次賦值給控制器,并運(yùn)行系統(tǒng)模型;
步驟5,輸出性能指標(biāo),判斷是否滿足控制要求,若滿足,則停止尋優(yōu); 若不滿足,則繼續(xù)尋優(yōu);
步驟 6,更新粒子群信息,重復(fù)上面步驟。
4 系統(tǒng)仿真
文中以循環(huán)水加熱器的電功率P為操作變量,通過(guò)循環(huán)水溫度來(lái)控制料筒溫度,所以料筒溫度T為被控變量。通過(guò)某五復(fù)合橡膠擠出機(jī)生產(chǎn)線現(xiàn)場(chǎng)所提供的實(shí)驗(yàn)數(shù)據(jù),利用MATLAB辨識(shí)實(shí)驗(yàn)數(shù)據(jù)[12],得到料筒溫度T與電加熱器功率P的關(guān)系,即系統(tǒng)傳遞函數(shù):
4. 1 干擾下Smith-模糊PID溫控系統(tǒng)響應(yīng)
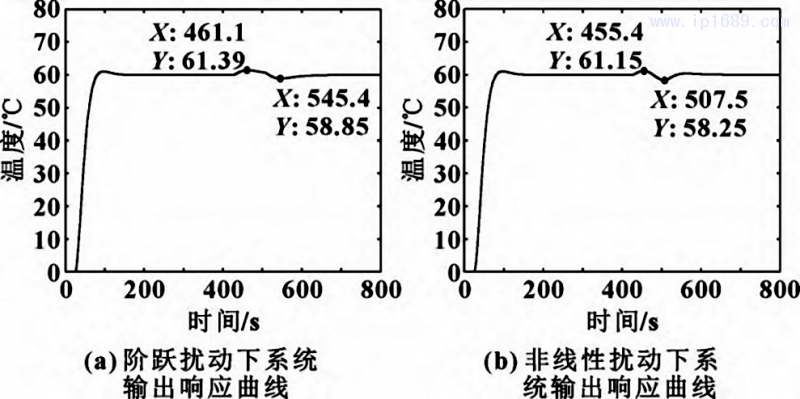
在Simulink中搭建Smith-模糊PID料筒溫度控制系統(tǒng)仿真模型,同時(shí)加入階躍與非線性擾動(dòng)進(jìn)行仿真。料筒目標(biāo)溫度選取為60℃,階躍與非線性擾動(dòng)信號(hào)的幅值均設(shè)置為5,擾動(dòng)作用時(shí)間為 400~480;非線性正弦擾動(dòng)信號(hào)頻率設(shè)置為0.05Hz,仿真結(jié)構(gòu)如圖 8 所示。Smith-模糊PID料筒溫控系統(tǒng)輸出響應(yīng)曲線如圖9所示。
圖 8 Smith-模糊 PID 料筒溫控系統(tǒng)仿真模型
圖 9 Smith-模糊 PID 料筒溫控系統(tǒng)輸出響應(yīng)曲線
由圖9可知:階躍與非線性干擾作用時(shí),Smith-模糊PID料筒溫控系統(tǒng)響應(yīng)波動(dòng)幅度分別為±1.4℃和±1.8℃,在仿真進(jìn)行到480s干擾作用結(jié)束時(shí),系統(tǒng)基本上分別在第600s和第550s恢復(fù)到原穩(wěn)定狀態(tài)。結(jié)果表明:在受到干擾作用后,Smith-模糊PID控制系統(tǒng)能克服擾動(dòng)并快速恢復(fù)到原穩(wěn)定狀態(tài),并且溫度控制精度在±2℃以內(nèi)。由于橡膠擠出工藝中料筒溫度控制性能指標(biāo)要求為±( 1~1. 5)℃,所以料筒溫度 Smith-模糊PID控制系統(tǒng)還沒有完全達(dá)到控制精度要求,因此采用HPSO算法進(jìn)一步優(yōu)化。
4. 2 HPSO優(yōu)化Smith-模糊PID溫控系統(tǒng)
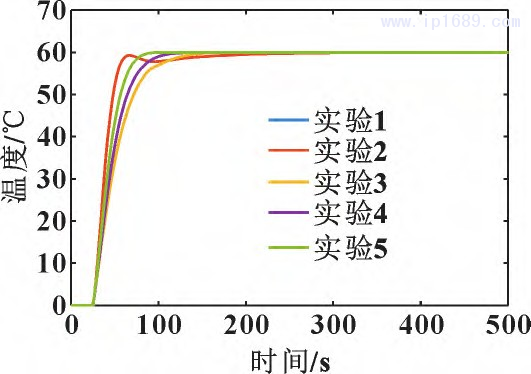
HPSO算法參數(shù)設(shè)定:種群規(guī)模為50,最大迭代次數(shù)為20,位移仿真間隔dt為0.3,w為2,c1為2,c2為2,xmax為10、0. 1、10,vmax=0. 5xmax,局部社會(huì)因子ρ為0.4,局部因子作用半徑R為0.2。進(jìn)行5次仿真實(shí)驗(yàn),得到 HPSO算法優(yōu)化 Smith-模糊PID控制器的響應(yīng)曲線,如圖10所示。HPSO算法優(yōu)化信息如圖11所示。PID參數(shù)隨迭代次數(shù)變化如圖12所示。
圖 10 HPSO 優(yōu)化 Smith-模糊 PID
圖 11 HPSO 優(yōu)化 Smith-模糊 PID 系統(tǒng)信息曲線
圖 12 PID 參數(shù)隨迭代次數(shù)的變化
由圖10可以看出:隨著迭代的進(jìn)行,系統(tǒng)輸出響應(yīng)越來(lái)越好。由圖11可以看出:迭代優(yōu)化到第7次以后,調(diào)節(jié)時(shí)間穩(wěn)定,而且調(diào)節(jié)時(shí)間曲線波動(dòng)較少,系統(tǒng)無(wú)超調(diào)量且保持穩(wěn)定,評(píng)價(jià)函數(shù)隨優(yōu)化過(guò)程波動(dòng)小并逐漸穩(wěn)定。由圖12可以看出:隨著迭代優(yōu)化7次后,3個(gè)參數(shù)的相對(duì)值穩(wěn)定不變,最終得到HPSO優(yōu)化Smith-模糊PID控制器的3個(gè)參數(shù)Kp、Ki、Kd分別為2. 657 8、0. 054 2和8. 360 4。
4. 3 HPSO 優(yōu)化前后抗干擾性對(duì)比
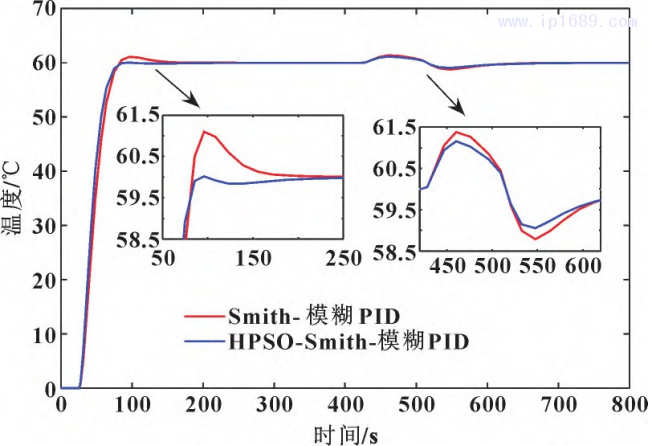
為驗(yàn)證HPSO算法優(yōu)化的 Smith-模糊PID系統(tǒng)具有更好的抗擾性能,在相同擾動(dòng)情況下對(duì)比分析 HP-SO 算法優(yōu)化的 Smith-模糊PID控制系統(tǒng)與Smith-模糊PID控制系統(tǒng)的抗擾性能。擾動(dòng)數(shù)值設(shè)置與前面相同,得到階躍擾動(dòng)下、非線性擾動(dòng)下系統(tǒng)抗擾性輸出曲線分別如圖13和圖14所示。
圖 13 階躍擾動(dòng)下HPSO 優(yōu)化 Smith- 模糊PID前后抗擾對(duì)比曲線
圖 14 非線性擾動(dòng)下 HPSO 優(yōu)化 Smith- 模糊PID前后抗擾對(duì)比曲線
由圖13、圖14可以看出:HPSO算法優(yōu)化后的系統(tǒng)動(dòng)態(tài)響應(yīng)無(wú)超調(diào),而優(yōu)化前的系統(tǒng)有大約2%的動(dòng)態(tài)超調(diào);在階躍干擾作用下,優(yōu)化后系統(tǒng)受干擾的波動(dòng)幅度為±1.1℃,優(yōu)化前系統(tǒng)受干擾的波動(dòng)幅度為±1.4℃; 在非線性干擾作用下,優(yōu)化后系統(tǒng)受干擾的波動(dòng)幅度為±1.2 ℃,優(yōu)化前系統(tǒng)受干擾的波動(dòng)幅度為±1.6℃。結(jié)果表明:HPSO-Smith模糊PID控制系統(tǒng)的動(dòng)態(tài)響應(yīng)無(wú)超調(diào)、穩(wěn)態(tài)誤差為零,溫度控制精度在± (1~1.5)℃以內(nèi),并且接近±1℃ ,能夠快速地跟蹤并抑制料筒溫度的變化。
5 結(jié)束語(yǔ)
基于Smith-模糊PID控制器,在PSO算法的基礎(chǔ)上設(shè)計(jì)出HPSO算法優(yōu)化Smith-模糊PID控制系統(tǒng),用于橡膠擠出機(jī)料筒溫度控制。HPSO算法優(yōu)化后的Smith-模糊PID控制系統(tǒng)在動(dòng)態(tài)響應(yīng)與抗干擾性能方面都比Smith- 模糊PID 控制系統(tǒng)有所提升。采用HPSO算法完成對(duì)PID參數(shù)基準(zhǔn)值的自動(dòng)尋優(yōu),從而使系統(tǒng)輸出響應(yīng)具有較好的動(dòng)態(tài)與穩(wěn)態(tài)性能。結(jié)果表明:在線性與非線性干擾作用下,HPSO算法優(yōu)化的Smith-模糊PID溫度控制系統(tǒng)仍具有良好的魯棒性與自適應(yīng)性,溫度控制精度在±(1~1.5)℃,并且接近±1℃,完全滿足橡膠擠出生產(chǎn)過(guò)程中對(duì)料筒溫度控制的指標(biāo)要求,能夠較好地實(shí)現(xiàn)橡膠擠出機(jī)料筒溫度的精準(zhǔn)控制。
參考文獻(xiàn):
[1] 王文昌. 影響精密擠出穩(wěn)定性的因素分析[J]. 化工管理,2015( 10) : 186-187.
[2] 孫若武.橡膠擠出機(jī)溫度壓力控制系統(tǒng)的研究[D]. 沈陽(yáng): 東北大學(xué),2014.
[3] 張臨松,王士軍,陳偉,等. 塑料擠出機(jī)的多路溫度控制系統(tǒng)設(shè)計(jì)[J].自動(dòng)化與儀表,2018,33(11) : 29-32.
[4] 李曉林.單螺桿精密擠出機(jī)理的研究[D]. 北京: 北京化工大學(xué),2003.
[5]邊志堅(jiān).模糊 PID 在鑄錠爐溫控系統(tǒng)中的應(yīng)用研究[D].石家莊: 河北科技大學(xué),2015.
[6] 李全俊,黃權(quán),李錦. Smith 預(yù)估模糊自適應(yīng) PID 控制在時(shí)滯系統(tǒng)中的應(yīng)用[J]. 兵工自動(dòng)化,2011,30(12) : 49-52.
[7] 高錦,章家?guī)r,馮旭剛,等.基于失配補(bǔ)償 Smith-RBF神經(jīng)網(wǎng)絡(luò)的主蒸汽壓力控制技術(shù)[J]. 重慶大學(xué)學(xué)報(bào),2019,42( 7) : 105-113.
[8] 劉晴,李鴻.基于 Smith 預(yù)估模型+模糊 PID 的地鐵列車空調(diào)控制[J].工業(yè)控制計(jì)算機(jī),2019,32(11) : 95-96.
[9] 王大志.面向?qū)嶋H工程問(wèn)題的粒子群優(yōu)化算法應(yīng)用技術(shù)的研究[D].沈陽(yáng): 東北大學(xué),2009.
[10] 史峰,王輝,郁磊. MATLAB 智能算法 30 個(gè)案例分析[M].北京: 北京航空航天大學(xué)出版社,2011.
[11] 張慶科.粒子群優(yōu)化算法及差分進(jìn)行算法研究[D]. 濟(jì)南: 山東大學(xué),2017.
[12] 楊麗娟.熱電堆傳熱過(guò)程的數(shù)學(xué)建模與實(shí)踐[D].杭州:杭州電子科技大學(xué),2015.
[13] 盛凱.冷喂料擠出機(jī)的溫度控制系統(tǒng)[J]. 橡塑技術(shù)與裝備,2001,27(11) : 52-54.
[14] 趙金龍.銷釘式冷喂料擠出機(jī)供膠系統(tǒng)在輪胎鋼絲簾布?jí)貉又械膽?yīng)用[J].橡膠科技,2016,14(6) : 39-42.
[15] 陳超,陳樂(lè)庚,譚開順,等.橡膠冷喂料擠出機(jī)綜合控制方法[J].橡膠工業(yè),2012,59(10) : 626-630.





























 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入... 塑料包裝材料的減...
塑料包裝材料的減...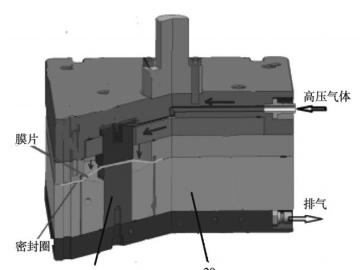 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I... 高性能注塑聚丙烯...
高性能注塑聚丙烯...













