王 丹1 薛 凱1 龐 博2
(1.天華化工機(jī)械及自動化研究設(shè)計(jì)院有限公司;2.沈陽透平機(jī)械股份有限公司)
摘要 介紹了BOPET薄膜回收造粒系統(tǒng)的結(jié)構(gòu)和工作原理,針對系統(tǒng)中傳統(tǒng)控制模式存在的問題,引入了PID控制算法和模糊控制算法。實(shí)際應(yīng)用結(jié)果表明:機(jī)組上料輸送不穩(wěn)定、切割壓實(shí)機(jī)料位不穩(wěn)定的問題均得到了解決,電機(jī)電流控制在120A±6%,成品物料粒子質(zhì)量滿足要求。
關(guān)鍵詞 模糊控制 PID控制 BOPET薄膜 回收造粒 切割壓實(shí)機(jī) 料位 電機(jī)電流
聚對苯二甲酸乙二酯(PET)是一種高度可回收的塑料樹脂,于1941年由杜邦公司的化學(xué)家在北美首次合成[1]。PET經(jīng)過雙向拉伸法可以制成 BOPET薄膜,該膜具有強(qiáng)度高、光學(xué)性能好、產(chǎn)能大、生產(chǎn)效率高及可回收等優(yōu)勢,在隔膜、建材、包裝和印刷領(lǐng)域被廣泛應(yīng)用[2]。在BOPET薄膜工業(yè)生產(chǎn)中,為降低成本和能耗,保護(hù)環(huán)境防止污染,普遍使用回收造粒系統(tǒng)對破膜和邊膜進(jìn)行回收造粒并重復(fù)利用,使之產(chǎn)生良好的社會和經(jīng)濟(jì)效益[3]。其中,薄膜回收造粒系統(tǒng)的一項(xiàng)關(guān)鍵技術(shù)就是控制切割壓實(shí)機(jī)進(jìn)料。因生產(chǎn)線是連續(xù)生產(chǎn)的,必須保證連續(xù)定量進(jìn)料。當(dāng)進(jìn)料量少于擠出機(jī)的出料量時,回收機(jī)拉條會變細(xì),甚至斷條,影響產(chǎn)品產(chǎn)量和生產(chǎn)進(jìn)度;當(dāng)進(jìn)料量多于擠出機(jī)的出料量時,物料會堆積在壓實(shí)料倉,造成物料溫度過高、物料結(jié)塊,嚴(yán)重時會導(dǎo)致壓實(shí)機(jī)過載,造成巨大的經(jīng)濟(jì)損失。為了精準(zhǔn)控制切割壓實(shí)機(jī)的進(jìn)料量,筆者提出一種BOPET薄膜回收造粒機(jī)組自動喂料控制改進(jìn)方法,希望為解決行業(yè)中的類似問題提供一定的參考借鑒。
1 薄膜回收造粒系統(tǒng)
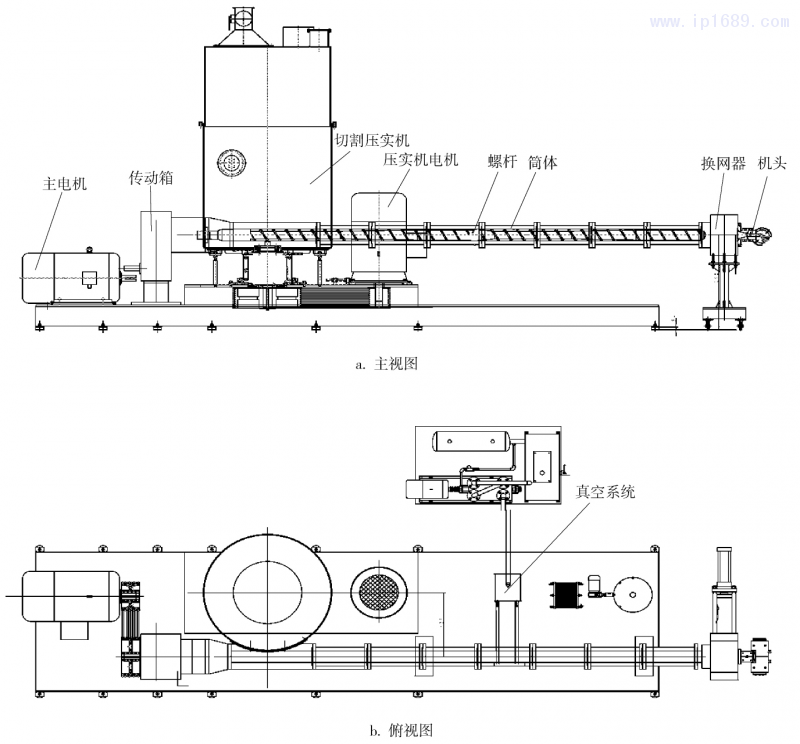
薄膜回收造粒系統(tǒng)(圖1)主要由破碎機(jī) 、破碎料倉、原料輸送機(jī)、切割壓實(shí)機(jī)、單螺桿擠出機(jī)、換網(wǎng)器和切粒機(jī)組成。
圖 1 薄膜回收造粒系統(tǒng)示意圖
BOPET薄膜雙向拉伸生產(chǎn)線產(chǎn)生的破膜和邊膜經(jīng)過破碎機(jī)在線粉碎后被存儲在破碎料倉中。破碎料具有堆積密度大、含水量高和輸送不均勻的特點(diǎn),因此無法通過傳統(tǒng)方式直接喂料進(jìn)入擠出機(jī)進(jìn)行造粒。為此,在實(shí)際生產(chǎn)中引入切割壓實(shí)環(huán)節(jié),破碎料先通過原料輸送機(jī)輸送到壓實(shí)機(jī)料倉內(nèi),在旋轉(zhuǎn)刀盤切刀與破碎料的相互作用下產(chǎn)生摩擦熱,薄膜碎片受熱后卷曲收縮使堆密度不斷增加。同時,在壓實(shí)機(jī)旋轉(zhuǎn)刀盤高速旋轉(zhuǎn)離心力的作用下,破碎料被不斷壓實(shí)。單螺桿擠出機(jī)的進(jìn)料口經(jīng)過特殊設(shè)計(jì),與壓實(shí)機(jī)料倉側(cè)面對接,從而使被壓實(shí)的破碎料不斷被推入擠出機(jī),進(jìn)而被擠出機(jī)螺桿帶走,進(jìn)行熔體造粒。
2 傳統(tǒng)控制模式存在的問題
在薄膜回收造粒系統(tǒng)中,為確保進(jìn)入擠出機(jī)的物料均勻穩(wěn)定,必須使壓實(shí)機(jī)中的破碎料保持在一定的料位。然而,切割壓實(shí)機(jī)料倉的刀盤高速旋轉(zhuǎn),破碎料堆密度低,各種形式的料位計(jì)都無法準(zhǔn)確、直接地測量料倉的實(shí)際料位。經(jīng)觀察發(fā)現(xiàn),壓實(shí)機(jī)料位與壓實(shí)機(jī)電機(jī)負(fù)載密切相關(guān),隨著原料料位的不斷增加,原料重量增加,進(jìn)而使壓實(shí)機(jī)電機(jī)負(fù)載增大,有功電流增加,且成正相關(guān)關(guān)系,因此可采用電機(jī)的有功電流來間接反映壓實(shí)機(jī)內(nèi)的料位。
傳統(tǒng)的控制模式是采用超馳控制方法,即設(shè)定一個電機(jī)電流的高限,當(dāng)壓實(shí)機(jī)電機(jī)電流超過高限電流時,表明壓實(shí)機(jī)料倉滿倉,這時輸送電機(jī)停轉(zhuǎn),上游料倉不再送料;當(dāng)壓實(shí)機(jī)電機(jī)電流低于高限電流時,表明壓實(shí)機(jī)料倉空倉,這時輸送電機(jī)運(yùn)轉(zhuǎn)連續(xù)送料[3]。然而該控制模式存在一定的弊端,剛輸送進(jìn)切割壓實(shí)機(jī)的物料較輕,沒有被壓實(shí),不會迅速引起壓實(shí)機(jī)電流的變化,存在一定的滯后性。在實(shí)際生產(chǎn)過程中,滯后性將導(dǎo)致切割壓實(shí)機(jī)電機(jī)電流大幅振蕩,振幅可達(dá)壓實(shí)機(jī)額定電流的15%左右。這種不穩(wěn)定會造成后續(xù)擠出機(jī)進(jìn)料不穩(wěn)定,扭矩上下波動幅度大,熔體擠出拉條粗細(xì)不均,粒子大小間歇性變化,嚴(yán)重影響成品質(zhì)量。
3 控制方法改進(jìn)
3.1 PID控制算法
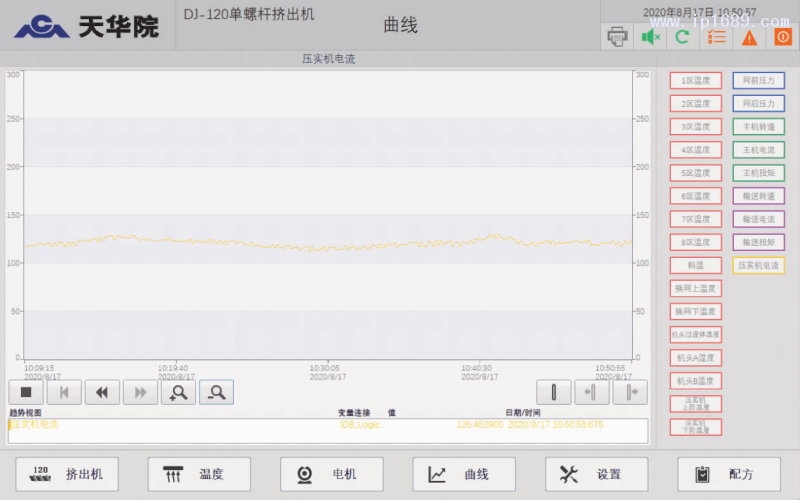
以天華化工機(jī)械及自動化研究設(shè)計(jì)院有限公司(以下簡稱天華院)DJ-120單螺桿擠出機(jī)為研究對象,引入PID控制算法。首先將物料輸送電機(jī)改為變頻調(diào)速電機(jī),通過調(diào)節(jié)電機(jī)轉(zhuǎn)速,使物料的輸送量連續(xù)可調(diào)節(jié)。根據(jù)輸送電機(jī)轉(zhuǎn)速與切割壓實(shí)機(jī)電機(jī)電流變化的動態(tài)關(guān)系,以切割壓實(shí)機(jī)電機(jī)電流設(shè)定值與實(shí)際值的偏差e作為PID控制器的輸入變量,以控制器的輸出控制量u來控制輸送電機(jī)轉(zhuǎn)速,得到切割壓實(shí)機(jī)電機(jī)電流曲線如圖2所示,可以看出,切割壓實(shí)機(jī)電機(jī)由于傳統(tǒng)控制模式導(dǎo)致電流波動大的現(xiàn)象得到了明顯改善,在穩(wěn)定狀態(tài)下,電機(jī)電流基本保持在設(shè)定電流120A的±9%以內(nèi)。
圖2 引入PID控制算法后的壓實(shí)機(jī)電機(jī)電流曲線
然而,碎膜非常蓬松,導(dǎo)致上游破碎料倉容易“架橋”,輸送電機(jī)的轉(zhuǎn)速與實(shí)際物料的輸送量無法呈現(xiàn)良好的線性關(guān)系,有時較低的轉(zhuǎn)速也會帶來大批的物料。另外,由于PID控制器中的微分器對系統(tǒng)中的噪聲會有放大作用,因此會導(dǎo)致輸出大幅變動,造成壓實(shí)機(jī)電機(jī)電流仍會每隔一段時間就出現(xiàn)不穩(wěn)定的情況,嚴(yán)重時甚至需要人工干預(yù)。
3.2 模糊控制算法
為進(jìn)一步提高控制質(zhì)量,消除噪聲干擾,保證電機(jī)電流穩(wěn)定,對PID參數(shù)采用動態(tài)化調(diào)節(jié),即對于不同的偏差程度采取不同的PID控制參數(shù),以提高控制響應(yīng)速度,為此筆者引入模糊控制算法。模糊控制算法是以模糊集合理論、模糊規(guī)則語言變量和模糊邏輯推理為基礎(chǔ)的計(jì)算機(jī)智能控制方法,可以透過模糊化將原本0和1的二值化控制轉(zhuǎn)變成0~1之間的數(shù)值,相對于原本非0即1的二分法,模糊控制算法更加接近人類的思維。雖然模糊控制算法的輸入、輸出均是模糊的,但透過解模糊化的步驟,即可得到精確的輸出值。
利用模糊集合理論可以將專家知識或操作人員經(jīng)驗(yàn)對應(yīng)的語言規(guī)則直接轉(zhuǎn)換為自動控制策略。通常的方法是使用模糊規(guī)則查詢表,用語言知識模型來設(shè)計(jì)和修正控制算法[4]。設(shè)模糊PID控制器的輸入變量為切割壓實(shí)機(jī)電機(jī)電流偏差e和偏差變化率ec,輸出變量為比例系數(shù)Kp和積分系數(shù)Ki,得到改進(jìn)后的模糊PID控制器結(jié)構(gòu)框圖如圖3所示。
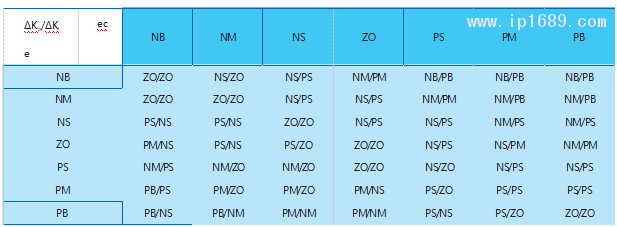
模糊規(guī)則語言變量為[NB,NM,NS,ZO,PS, PM,PB],根據(jù)PID控制算法參數(shù)整定的經(jīng)驗(yàn)建立模糊控制規(guī)則表(表1)。
表1 模糊控制規(guī)則表
運(yùn)行過程中,將輸入?yún)?shù)e和ec模糊化,然后通過查詢模糊控制規(guī)則表并經(jīng)過解模糊化后,輸出參數(shù)ΔKp 和ΔKi。
經(jīng)過模糊控制算法修正后的PID控制器參數(shù)為:
Kp=Kp0+ΔKp
Ki=Ki0+ΔKi
其中,Kp0、Ki0為PID控制器的初始比例系數(shù)和積分系數(shù)。實(shí)際應(yīng)用中,模糊控制規(guī)則采用IF-THEN方式,其結(jié)構(gòu)簡單,易于修改和掌握,比較適合PLC編程實(shí)現(xiàn)。
4 應(yīng)用效果
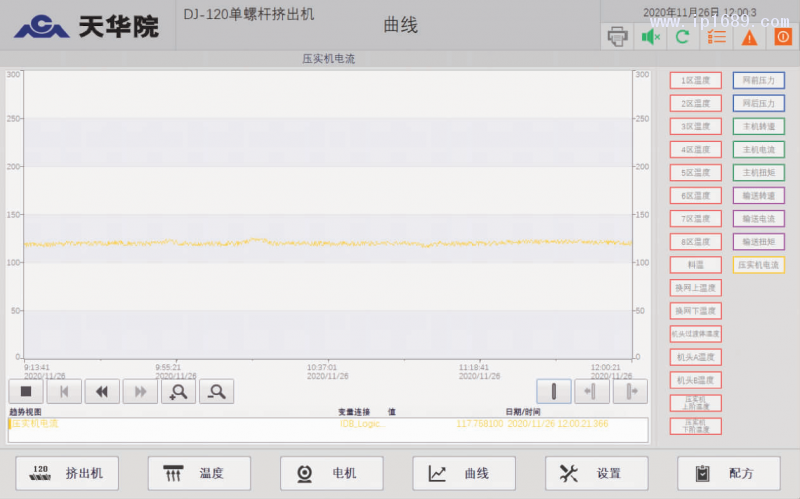
圖4為引入模糊控制算法后的壓實(shí)機(jī)電機(jī)電流曲線,可以看出,壓實(shí)機(jī)電機(jī)電流保持在120A左右,由原料輸送機(jī)不穩(wěn)定造成的電流波動大幅減弱,其中最大電流126.3A,最小電流116.7A,波動范圍在±6%以內(nèi)。由破碎料輸送機(jī)不穩(wěn)定所帶來的干擾被大幅減弱,在一定范圍內(nèi)壓實(shí)機(jī)電機(jī)可以長期平穩(wěn)運(yùn)行,壓實(shí)機(jī)內(nèi)液位可以保持一定的穩(wěn)定性。
圖4 引入模糊控制算法后的壓實(shí)機(jī)電機(jī)電流曲線
壓實(shí)機(jī)內(nèi)料位的穩(wěn)定使得造粒擠出機(jī)進(jìn)料均勻,長期保持動態(tài)穩(wěn)定進(jìn)料,擠出機(jī)主電機(jī)扭矩長期保持穩(wěn)定運(yùn)行。對造粒機(jī)出料口進(jìn)行隨機(jī)采樣,如圖5所示,可以看出物料粒子均勻穩(wěn)定,消除了此前粒子大小每隔一段時間就會發(fā)生周期性變化的問題。
圖5 物料粒子實(shí)物圖
綜上所述,通過PID控制器調(diào)節(jié)破碎料輸送機(jī),并結(jié)合模糊控制算法,在破碎料進(jìn)料控制中取得了滿意的效果。
5 結(jié)束語
PID調(diào)節(jié)喂料量并結(jié)合模糊控制算法控制切割壓實(shí)機(jī)料位的方式目前已經(jīng)應(yīng)用在BOPET薄膜回收生產(chǎn)線中,解決了進(jìn)料系統(tǒng)大滯后、非線性等多種因素共同影響造成的控制難點(diǎn)。該生產(chǎn)線目前運(yùn)行穩(wěn)定,生產(chǎn)的回收顆粒質(zhì)量良好,批次質(zhì)量穩(wěn)定,使用維護(hù)成本低,在客戶現(xiàn)場已長時間平穩(wěn)運(yùn)行,得到了客戶的好評和肯定。
參考文獻(xiàn)
[1] Tennant D J.Manufactu re of Highly Polymeric Sub-stances[P] .US:US2465150A,1949-03-22.
[2] 馮樹銘 .PET薄膜雙向拉伸技術(shù)及發(fā)展方向[J] . 聚酯工業(yè),2009,22(2):1~3,31.
[3] 張國強(qiáng) ,馬永金 .BOPET廢膜再生技術(shù)開發(fā)[J].橡塑技術(shù)與裝備,2017,43(16):16~19.
[4] 王芳,潘春榮.基于IGA優(yōu)化模糊PID的堆垛機(jī)控制系統(tǒng)研究[J].制造業(yè)自動化,2020,42(11):82~86,106.


























 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入... 塑料包裝材料的減...
塑料包裝材料的減... 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I... 高性能注塑聚丙烯...
高性能注塑聚丙烯...





